Richard Hanten, Cornelia Schulz
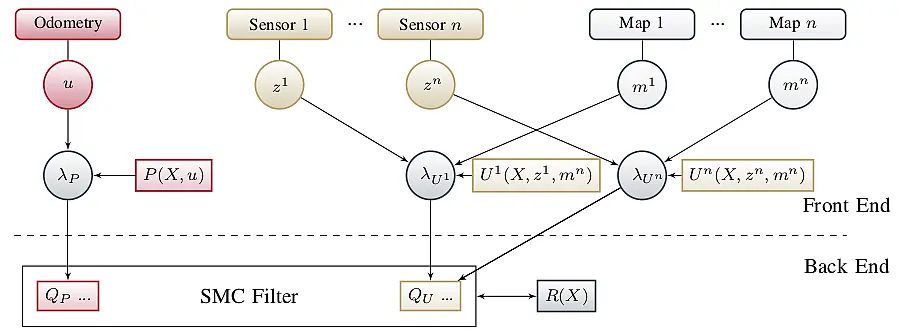
MuSe-SMC is a general purpose Monte Carlo framework, which allows the implementation of localization and optimization processes. While the user defines the state-space representation and the mathematical basics, the Sequential Monte Carlo method in the core of the framework works the same.
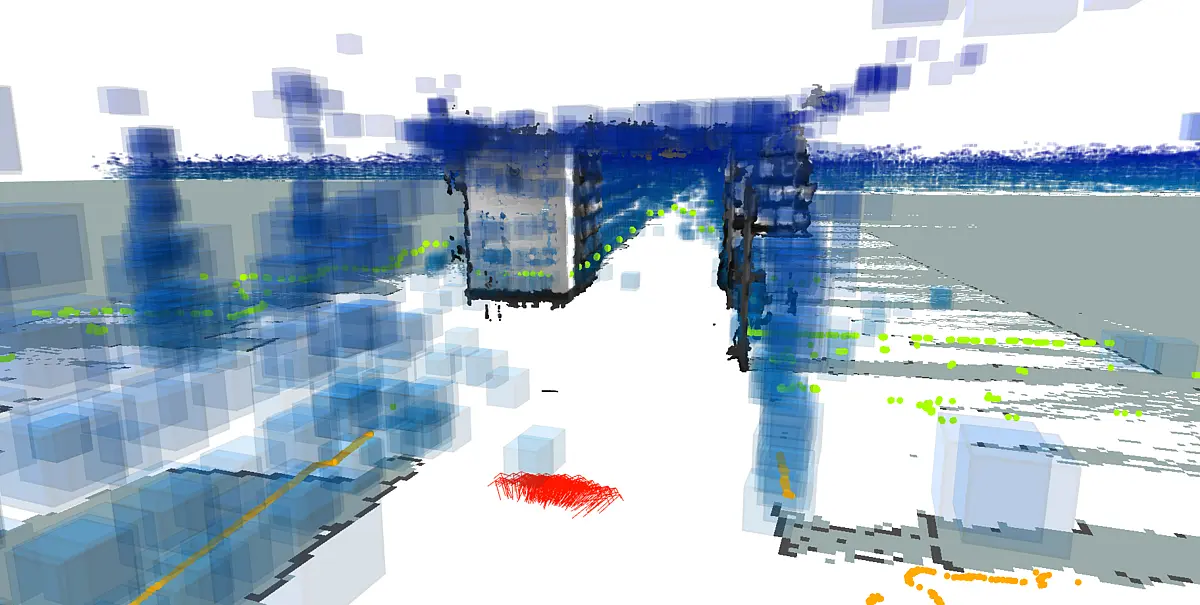
Currently, we tested the framework for 2D particle-based localization, supporting several sensor inputs. The general functionality looks as follows.