@inproceedings{boss2022samurai,
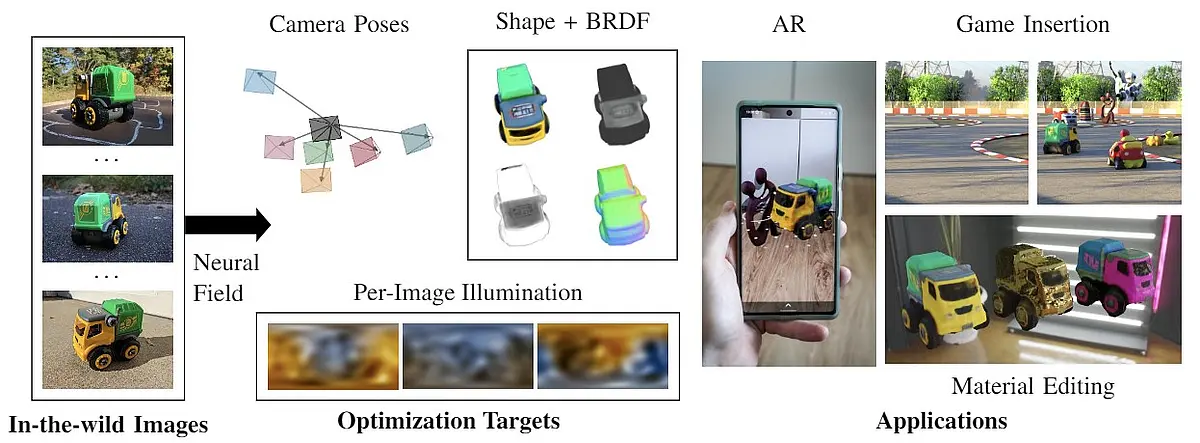
title={{SAMURAI}: {S}hape {A}nd {M}aterial from {U}nconstrained {R}eal-world {A}rbitrary {I}mage collections},
author={Boss, Mark and Engelhardt, Andreas and Kar, Abhishek and Li, Yuanzhen and Sun, Deqing and Barron, Jonathan T. and Lensch, Hendrik P.A. and Jampani, Varun},
year={2022,
booktitle = {NeurIPS}
}