A large part of hospital staff's working time is spent on simple transportation tasks. Therefore we are developing an autonomous transportation system with person recognition, in cooperation with the company E&K Automations GmbH. With this system we want to relieve hospital staff of their transportation work. Most current systems are unable to operate in environments shared with visitors and patients. Through modern 3D sensors, intelligent person detection and automatic path planning PATSY's goal is to fill this gap.
The automated guided vehicles (AGVs) are supposed to move around in hospitals without the use of additional markers or guiding tracks. They should also cope with unexpected obstacles like people, boxes, beds, etc. and autonomously find alternative paths. This will enable the system to autonomously transport containers all the way from the basement into the ward.
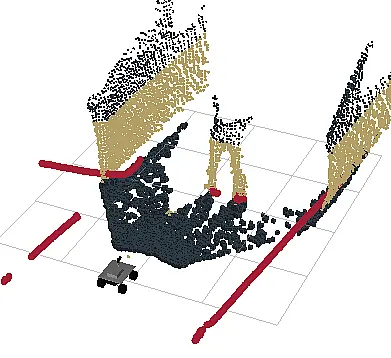
The robots used for this project are developed by our project partner E&K Automations GmbH. They are built with a low height, which allows them to drive below containers. Through a strong mechanic they are able to lift a whole container with a maximum weight of 250 kg. Every robot is equipped with 2D laser scanners and 3D sensors to sense the environment.