Cognitive Systems Table Tennis Robot
Externer Inhalt
Hier wäre eigentlich ein Video zu sehen. Damit Sie diesen Inhalt (Quelle: www.xyz.de) sehen können, klicken Sie bitte auf "Akzeptieren". Wir weisen Sie darauf hin, dass durch das Abspielen des Videos neben Cookies zur Videowiedergabe auch Cookies des Drittanbieters zu Targeting- und Werbezwecken gesetzt und Informationen ggf. mit weiteren Diensten des Drittanbieters verknüpft werden können. Weitere Informationen und eine Widerrufsmöglichkeit finden Sie in unserer Datenschutzerklärung.
Spin Detection
Externer Inhalt
Hier wäre eigentlich ein Video zu sehen. Damit Sie diesen Inhalt (Quelle: www.xyz.de) sehen können, klicken Sie bitte auf "Akzeptieren". Wir weisen Sie darauf hin, dass durch das Abspielen des Videos neben Cookies zur Videowiedergabe auch Cookies des Drittanbieters zu Targeting- und Werbezwecken gesetzt und Informationen ggf. mit weiteren Diensten des Drittanbieters verknüpft werden können. Weitere Informationen und eine Widerrufsmöglichkeit finden Sie in unserer Datenschutzerklärung.
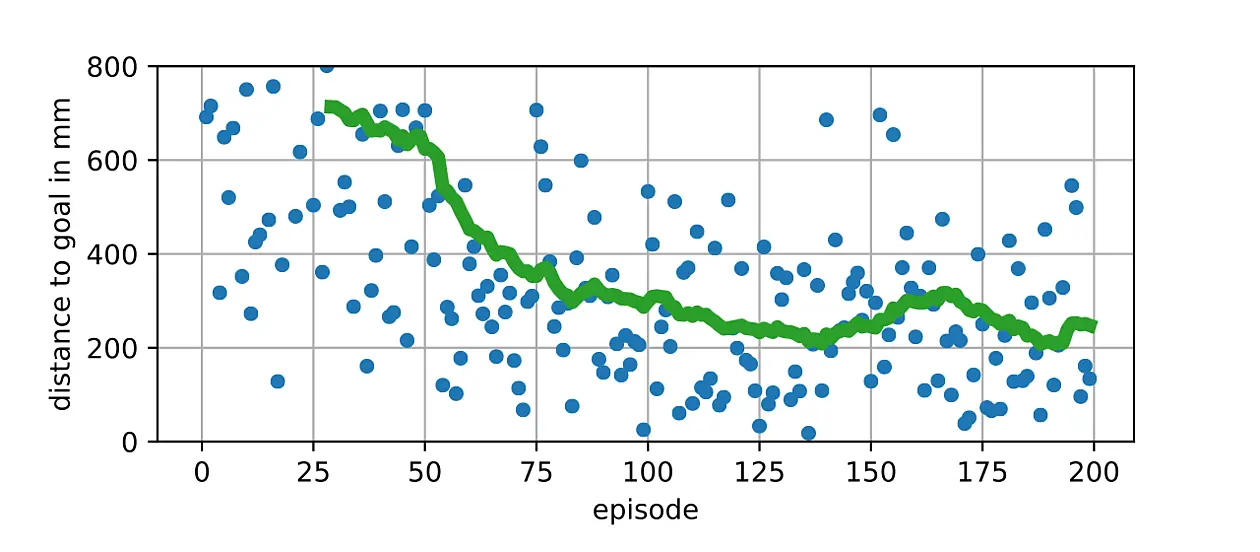
Learning Return Strokes in 200 balls

Externer Inhalt
Hier wäre eigentlich ein Video zu sehen. Damit Sie diesen Inhalt (Quelle: www.xyz.de) sehen können, klicken Sie bitte auf "Akzeptieren". Wir weisen Sie darauf hin, dass durch das Abspielen des Videos neben Cookies zur Videowiedergabe auch Cookies des Drittanbieters zu Targeting- und Werbezwecken gesetzt und Informationen ggf. mit weiteren Diensten des Drittanbieters verknüpft werden können. Weitere Informationen und eine Widerrufsmöglichkeit finden Sie in unserer Datenschutzerklärung.

{kind=link}
Externer Inhalt
Hier wäre eigentlich ein Video zu sehen. Damit Sie diesen Inhalt (Quelle: www.xyz.de) sehen können, klicken Sie bitte auf "Akzeptieren". Wir weisen Sie darauf hin, dass durch das Abspielen des Videos neben Cookies zur Videowiedergabe auch Cookies des Drittanbieters zu Targeting- und Werbezwecken gesetzt und Informationen ggf. mit weiteren Diensten des Drittanbieters verknüpft werden können. Weitere Informationen und eine Widerrufsmöglichkeit finden Sie in unserer Datenschutzerklärung.