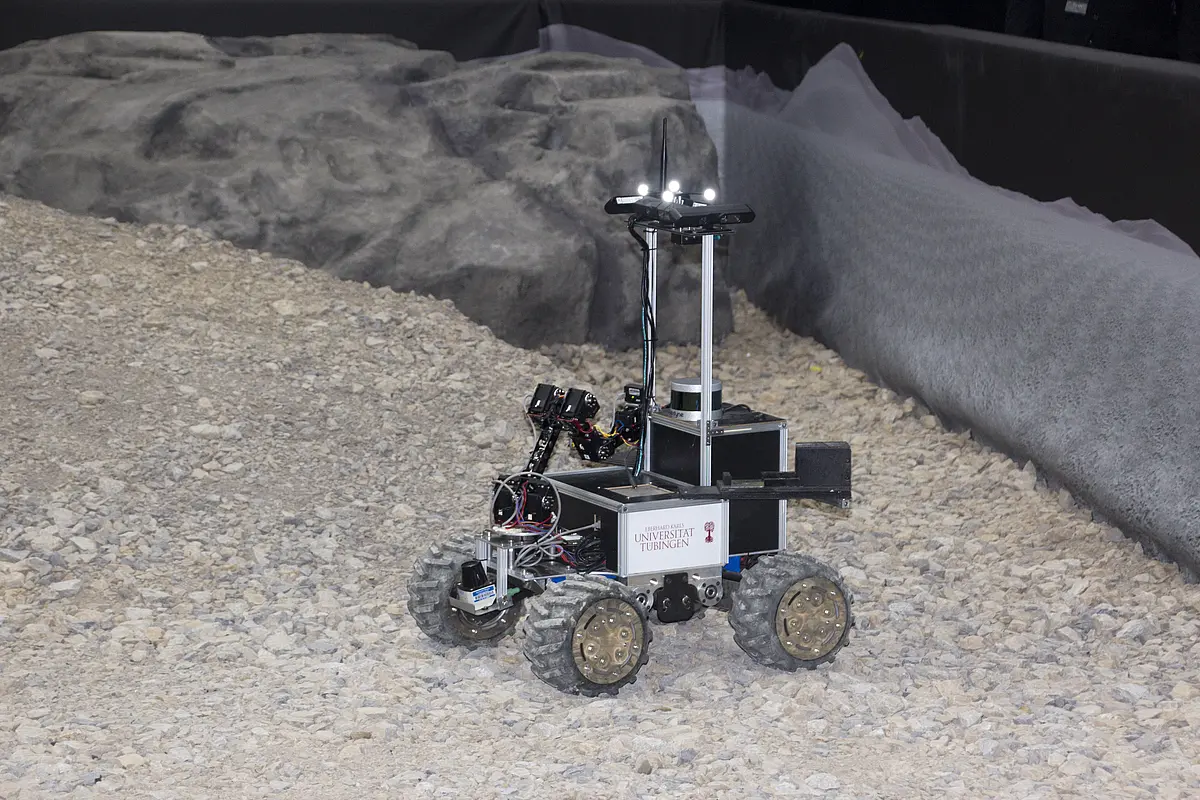
We have spent one year developing our solution, which resulted in two rovers, capable of robust and fully autonomous exploration and navigation, including object detection/recognition and manipulation. The two rovers are almost identical robots Leia and Luke, based on the Summit XL platforms and CrustCrawler Pro-Series arms. Our major work was done with the robot Leia, while Luke remained for support and redundancy.