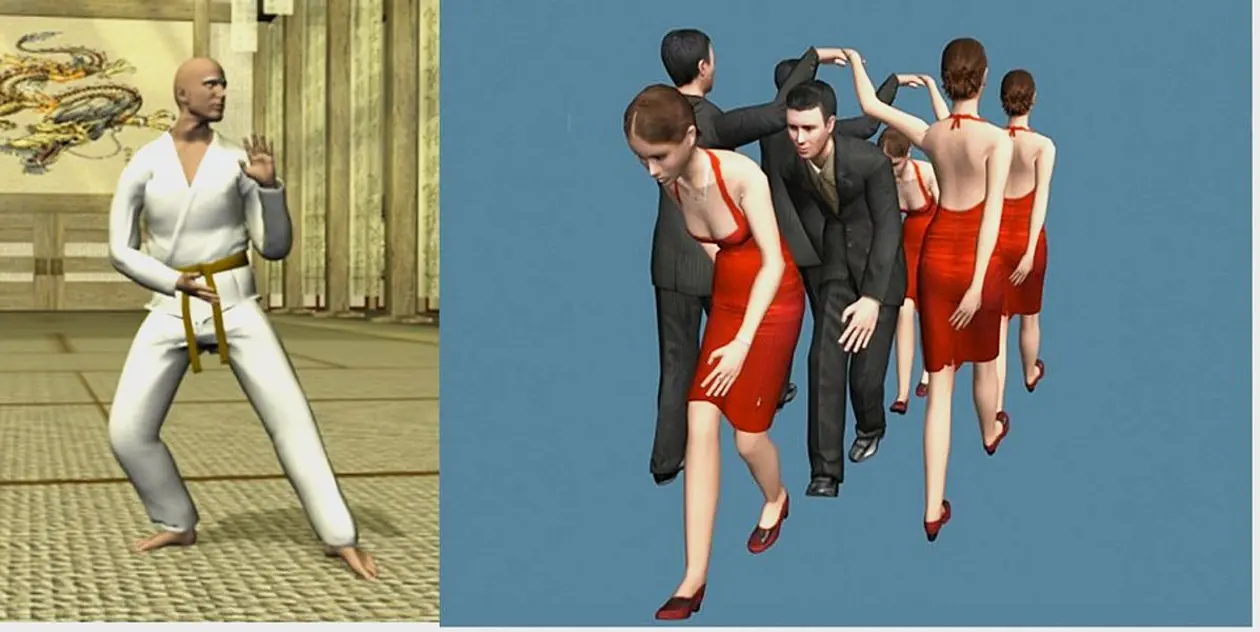
A key method for the study of the perception and control of complex body movements is motion capture, a method for the highly accurate recording of complex human body movements. In order to reconstruct the movement trajectories of the body's joints, a large number of reflecting markers are attached to characteristic points (typically around 40) of the body surface.
Optical motion capture systems record the three-dimensional positions of the markers using multiple cameras, which typically work in the infrared and which also contain LEDs that emit infrared light in order to illuminate the markers. By applying appropriate algorithms for image processing the makers can be efficiently segmented from the image background. The three-dimensional marker positions are reconstructed from the two-dimensional camera images, filling in missing parts of trajectories by interpolation. Multiple groups in the CIN use VICON motion capture systems with sampling rates between 120 and 500 Hz and between 6 and 16 cameras. Movements are recorded as basis for the analysis of the motor behaviour, e.g. for the analysis of patients with movement disorders or to identify characteristic parameters of body movements that carry information, e.g. about emotion or other movement styles.
Same technology, different story
The same technology is applied as well in computer animation, e.g. for the creation of Hollywood movies such as Lord of the Rings. As a research tool motion capture is used by several groups within the CIN to generate visual stimuli to study perception of body motion and the simulation of virtual characters in virtual reality applications. The same technology is also useful for technical applications, such as character animation in computer graphics and the synthesis of human-like movements for robotics systems. Advanced work tries to read out the position data in real-time and uses it for the online animation of virtual characters, for example to study how executed movements influence the perception of body motion. In addition, several groups work on the extension of this technology to animals, for example to record arm and hand movements of nonhuman primates.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}